១. លក្ខណៈបច្ចេកទេសនៃម៉ូទ័រ eVTOL
In ចែកចាយអគ្គិសនីកម្លាំងរុញច្រាន ម៉ូទ័រជំរុញម៉ាស៊ីនរុញច្រាន ឬកង្ហារច្រើននៅលើស្លាប ឬតួយន្តហោះ ដើម្បីបង្កើតជាប្រព័ន្ធរុញច្រានដែលផ្តល់កម្លាំងរុញច្រានដល់យន្តហោះ។ ដង់ស៊ីតេថាមពលរបស់ម៉ូទ័រប៉ះពាល់ដោយផ្ទាល់ទៅលើសមត្ថភាពផ្ទុកបន្ទុករបស់យន្តហោះ។ សមត្ថភាពបញ្ចេញថាមពល ភាពជឿជាក់ និងភាពបត់បែនបរិស្ថានរបស់ម៉ូទ័រ គឺជាកត្តាសំខាន់ៗដើម្បីកំណត់លក្ខណៈថាមវន្ត និងសុវត្ថិភាពរបស់យន្តហោះដែលដំណើរការដោយអគ្គិសនី។ ការជ្រើសរើសយានយន្តអគ្គិសនី យន្តហោះគ្មានមនុស្សបើក និងម៉ូទ័រ eVTOL គឺខុសគ្នាដោយសារតែការចំណាយផ្សេងៗគ្នា សេណារីយ៉ូកម្មវិធី និងហេតុផលផ្សេងទៀត [1]។

(ប្រភពរូបថត៖ គេហទំព័រផ្លូវការរបស់ Network/Safran)
1) រថយន្តអគ្គិសនី: មេដែកអចិន្ត្រៃយ៍បន្ថែមទៀតម៉ូទ័រធ្វើសមកាលកម្ម,ម៉ូទ័រមេដែកអចិន្ត្រៃយ៍ដែលមានប្រសិទ្ធភាពខ្ពស់ និងកម្លាំងបង្វិលជុំខ្ពស់អាចផ្តល់នូវបទពិសោធន៍បើកបរកាន់តែប្រសើរ។ ក្នុងពេលជាមួយគ្នានេះ ដង់ស៊ីតេថាមពលខ្ពស់នៃម៉ូទ័រមេដែកអចិន្ត្រៃយ៍ក៏អាចជួយយានយន្តអគ្គិសនីទទួលបានថាមពលខ្ពស់ជាងមុនក្រោមបរិមាណដូចគ្នា។
(2) យន្តហោះគ្មានមនុស្សបើក៖ ប្រដាប់គ្មានជក់ដែលប្រើជាទូទៅម៉ូទ័រ DC។ម៉ូទ័រ DC ឥតជក់មានទម្ងន់ស្រាល និងសំឡេងរំខានទាប ហើយថ្លៃថែទាំក៏ទាប ដែលស័ក្តិសមសម្រាប់តម្រូវការហោះហើររបស់យន្តហោះគ្មានមនុស្សបើក (UAVs)។ ទីពីរ ល្បឿនរបស់ម៉ូទ័រ DC ឥតជក់គឺខ្ពស់ ដែលស័ក្តិសមសម្រាប់តម្រូវការហោះហើរក្នុងល្បឿនលឿនរបស់យន្តហោះគ្មានមនុស្សបើក។ ឧទាហរណ៍ DJI ប្រើម៉ូទ័រឥតជក់។
(3) eVTOL៖ តម្រូវការខ្ពស់ជាងសម្រាប់ប្រសិទ្ធភាពម៉ូទ័រ និងដង់ស៊ីតេកម្លាំងបង្វិលជុំ ម៉ូទ័រស៊ីសង្វាក់មេដែកអចិន្ត្រៃយ៍គឺជាដំណោះស្រាយដ៏ជោគជ័យមួយសម្រាប់ប្រព័ន្ធថាមពលរុញច្រានអគ្គិសនី ពីព្រោះម៉ូទ័រមេដែកអចិន្ត្រៃយ៍លំហូរអ័ក្សមានអត្រាប្រើប្រាស់ខ្ពស់នៃលំហរ៉ាឌីកាល់ ហើយដង់ស៊ីតេថាមពល និងដង់ស៊ីតេកម្លាំងបង្វិលជុំមានគុណសម្បត្តិក្នុងករណីដែលសមាមាត្រអង្កត់ផ្ចិតប្រវែងតូច។ យន្តហោះ VTOL អគ្គិសនីបច្ចុប្បន្ន ដូចជា Joby S4 និង Archer Midnight សុទ្ធតែប្រើប្រាស់ម៉ូទ័រស៊ីសង្វាក់មេដែកអចិន្ត្រៃយ៍ [1]។
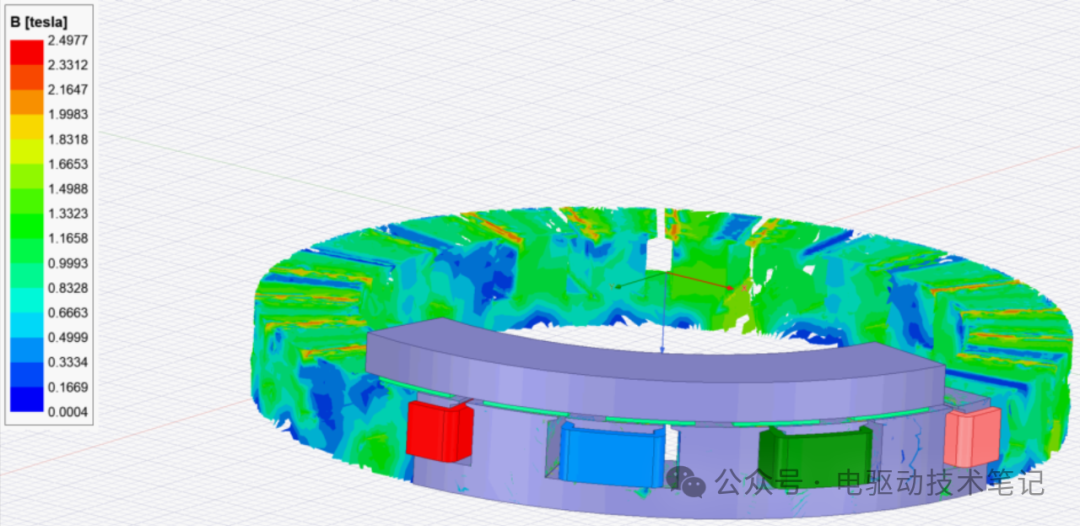
រូបភាពខាងក្រោមបង្ហាញរូបភាពពពកនៃអាំងតង់ស៊ីតេអាំងឌុចស្យុងម៉ាញេទិករបស់រ៉ូទ័រថេរនៃម៉ូទ័រលំហូរអ័ក្សដែលមានស្តាទ័រតែមួយដែលមានរ៉ូទ័រតែមួយ។
រូបភាពខាងក្រោមនេះគឺជាការប្រៀបធៀបនៃប៉ារ៉ាម៉ែត្រយន្តហោះអគ្គិសនី និងម៉ូទ័រយានយន្តអគ្គិសនី។

២. និន្នាការអភិវឌ្ឍន៍ម៉ូទ័រ eVTOL
បច្ចុប្បន្ននេះ និន្នាការអភិវឌ្ឍន៍ចម្បងនៃប្រព័ន្ធថាមពល eVTOL គឺកាត់បន្ថយទម្ងន់នៃរចនាសម្ព័ន្ធម៉ូទ័រ និងទម្ងន់ជំនួយនៃប្រព័ន្ធត្រជាក់ ដោយការកែលម្អបច្ចេកវិទ្យារចនាអេឡិចត្រូម៉ាញ៉េទិច បច្ចេកវិទ្យាគ្រប់គ្រងកម្ដៅ និងបច្ចេកវិទ្យាទម្ងន់ស្រាល ហើយកែលម្អដង់ស៊ីតេថាមពលរបស់ម៉ូទ័រ និងសមត្ថភាពបញ្ចេញថាមពលនៃលក្ខខណ្ឌអថេរជាច្រើនប្រភេទឥតឈប់ឈរ។ យោងតាម "ការស្រាវជ្រាវ និងអភិវឌ្ឍន៍រថយន្តហោះ និងបច្ចេកវិទ្យាសំខាន់ៗ" ម៉ូទ័រជំរុញអាកាសចរណ៍អាចធ្វើឱ្យដង់ស៊ីតេថាមពលដែលបានវាយតម្លៃនៃតួម៉ូទ័រលើសពី 5kW/kg ដោយប្រើប្រាស់សម្ភារៈអ៊ីសូឡង់ដែលមានដែនកំណត់សីតុណ្ហភាពខ្ពស់ជាង សម្ភារៈមេដែកអចិន្ត្រៃយ៍ដែលមានដង់ស៊ីតេថាមពលម៉ាញ៉េទិចខ្ពស់ជាង និងសម្ភារៈរចនាសម្ព័ន្ធស្រាលជាង។ តាមរយៈការកែលម្អការរចនារចនាសម្ព័ន្ធអេឡិចត្រូម៉ាញ៉េទិចរបស់ម៉ូទ័រ ដូចជាការប្រើប្រាស់អារេម៉ាញ៉េទិច Halbach រចនាសម្ព័ន្ធគ្មានស្នូលដែក របុំខ្សែ Litz និងបច្ចេកវិទ្យាផ្សេងទៀត ក៏ដូចជាការកែលម្អការរចនាការរលាយកំដៅរបស់ម៉ូទ័រ គេរំពឹងថាដង់ស៊ីតេថាមពលដែលបានវាយតម្លៃនៃតួម៉ូទ័រអាចឈានដល់ 10kW/kg នៅឆ្នាំ 2030 ហើយដង់ស៊ីតេថាមពលដែលបានវាយតម្លៃនឹងលើសពី 13kW/kg នៅឆ្នាំ 2035 [1]។

៣. ការប្រៀបធៀបផ្លូវអគ្គិសនីសុទ្ធ និងផ្លូវហាយប្រ៊ីត
បើប្រៀបធៀបជាមួយផ្លូវអគ្គិសនីសុទ្ធ និងផ្លូវកូនកាត់ ពីការជ្រើសរើសក្រុមហ៊ុនផលិតពាក់ព័ន្ធបច្ចុប្បន្ន គម្រោង eVTOL ក្នុងស្រុកភាគច្រើនផ្អែកលើគ្រោងការណ៍អគ្គិសនីសុទ្ធ ដែលកំណត់ដោយដង់ស៊ីតេថាមពលនៃថ្មលីចូម-អ៊ីយ៉ុង ហើយ eVTOL ដែលមានសមត្ថភាពដឹកអ្នកដំណើរទាប គឺជាកន្លែងចុះចតដ៏ល្អបំផុតនៃបច្ចេកវិទ្យាជំរុញដោយអគ្គិសនីសុទ្ធ។ នៅក្រៅប្រទេស ក្រុមហ៊ុនផលិតមួយចំនួនបានដាក់ចេញផែនការកូនកាត់ជាមុន ហើយបាននាំមុខគេក្នុងការធ្វើតេស្ត និងការធ្វើម្តងទៀតច្រើនជុំ។ ដូចដែលអាចមើលឃើញពីតារាងខាងក្រោម គ្រោងការណ៍កូនកាត់គឺច្បាស់ជាខ្លាំងជាងនៅក្នុងមុំស៊ូទ្រាំ ហើយអាចសម្រេចបាននូវកម្មវិធីកាន់តែច្រើននៅក្នុងសេណារីយ៉ូនៃចរាចរណ៍ចម្ងាយមធ្យម-វែង និងរយៈកម្ពស់ទាបនាពេលអនាគត [1]។
ពេលវេលាបង្ហោះ៖ ថ្ងៃទី ២៧ ខែកុម្ភៈ ឆ្នាំ ២០២៥